Resolution
What is it in general?
Resolution describes in general the ability of a “system” to provide “details”. Systems can be anything, a thermometer , a speedometer in a car, a TV screen, a printer, … and last but not least cameras and lenses.
How much resolution makes sense?
When people talk about cameras, easily a Megapixel race starts. The general optinion in the consumer market may be “the more, the better”.
Marketing is the big player behind the scenes. If my competitor offers 1 Mega-something and I can offer two Mega-something, this is usually reason enough for the subconcious mind of the consumer to go for the higher number.
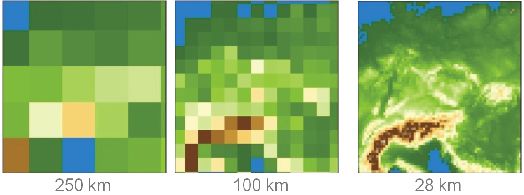
All depends on the information we need. If we are interested in the position of the Alpes with an accuracy of +/-100km , the right image above definitely has enough resolution. No need for a map with a resolution that shows individual cars.
Do we need to know the temperature with a resolution of 1/100 degree?
For half a century a VGA TV resolution (640×480 pixels) was just fine for us to get the “needed” information. These days HDTV and 4K resolution is a must. Again .. it’s nice to have, but is it needed?
A strange phenomenon in terms of resolution are ..
Desktop printers: They once offered like 200dpi .. some offer 9.600dpi these days.
dpi is short for “dots per inch”. It does not mean however that a printer could print 1/200th of an inch thin lines then nor 1/9600th of an inch wide lines now!
Resolution comes at a cost
When a new TV with extra high resolution appears at the market, the prices are very high. This is because the manufactures obviously can sell it at that price and because the development costed lots of money.
Once this new resolution becomes standard, the prices drop considerably.
But as long as its not mass product:
High resolution = higher precision, better production machines, better inspection tools, better workers, .. needed, maybe even brand new production strategies)As a result: Low volume production -> high prices
In our daily lives we learnt:
- Media with higher writing speed need a new media writer
- Media with higher capacity, BlueRay disks etc, need needs a special player
- Highres lossless sound recordings need more space
The “hidden” costs of high sensor resolution:
- Highres Cameras need much better lenses.
- Highres cameras need a faster interface to the computer
- As the bandwidth (=pixels per second) of an interface is limited, if the number of pixels grows by a factor, the frames per second go down by this factor.
- When we can get color images the same resolution as greyscale images before, the software got to be adapted.
- If we there are more pixels per image, we have to process more pixels, if there are more frames per second, we have to process more frames per second. A faster software, a faster computer, even a better programmer might be needed.
- With shrinking pixel sizes, the “noise” increases. Algorithms might have to be adapted to the previously absent noise, additional light sources might be necessary to provide enough light for a low noise image.
- With shrinking pixel sizes, the light sensitivity is reduced, which might cause problems in dusk and dawn.
- As color images in general work with a ratio Red : Green: Blue, special care has to be taken about sensor noise, as this influences the ratios, say, the colors.
- The higher the resolution, the more difficult it is to have a high “local contrast”.
Contrast:
The optical term contrast of an image is pretty much what we would expect from our daily use of the word.

However, we have to distinguish global contrast …

… from local contrast :
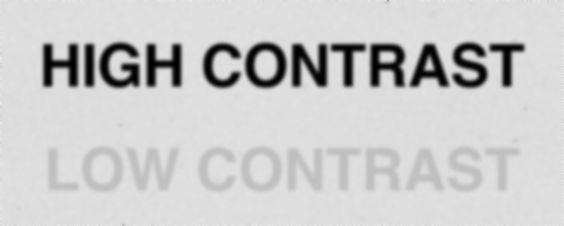
The global contrast in the two images above is about the same, however the local contrast (the change from pixel to pixel) is less high in the lower image, because of the slight blurring.
The limits of resolution:
Lens resolution limits:
Apart from the production quality, the resolution of a lens is limted by a physical effect called “diffraction”.
The “best possible” lenses are called “diffraction limited”, read : they are as good as allowed by physics … “only limited by diffraction”.
In short, diffraction is an (unexpected) change in direction of light particles that occurs if they don’t have neighbors “travelling” in the same direction. As a result diffraction occurs at the rim of a lens iris, at the surface of metal rods, threads etc.
The degree of diffraction depends on the amount of “rim” compared to the “clear” area.
The area of a circle is A = PI * radius * radius.
The length of the circumference of a circle is R = 2 * PI * radius.
So Rim / Area = R / A = (2 * PI * radius) / (PI * radius * radius) = 2/radius
Say, the smaller the radius, the more influence has the rim, compared to the center.Also, the higher the energy of the
light, the less diffraction occurs. Say, blue
light has a lower diffraction than red
light and red has a lower diffraction than infrared
light.
According to the “
Rayleigh Criterion” the smallest dot a diffraction limited
lens can generate has a diameter of
D = 2 * 1.22 * wavelength * F#
The resolution of such a
lens is R = 1.22 * wavelength * F# at about 20%
contrast.
For a wavelength of 400nm we get (for 400nm
light)
D = 2 * 1.22 * wavelength * F# = 2 * 1.22 * 400nm * F# = 976nm * F#
As 1000nm = 1um, we get as a
rule of thumb D = F# um , say, the F# in micrometers.
Accordingly we get as resolution (for 400nm
light and 20%
contrast) R = 1.22 * wavelength * F# = 1.22 * 400nm * F# = 488nm * F# , say “half the F#” in micrometers
For a wavelength of 800nm we get (for 800nm
light)
D = 2 * 1.22 * wavelength * F# = 2 * 1.22 * 800nm * F# = 1952nm * F#
As 1000nm = 1um, we get as a
rule of thumb D = 2*F# um , say, two times the F# in micrometers.
Accordingly we get as resolution (for 800nm
light and 20%
contrast) R = 1.22 * wavelength * F# = 1.22 * 800nm * F# = 976nm * F# , say “the F#” in micrometers
As a side result we notice :
The best possible resolution of a
lens by physics depends (linearly) on the wavelength : double wavelength = double size of the smallest details that can be resolved
One way to achieve a better resolution it to use a smaller wavelength for the
lens design (i.e. 440nm blue instead of 660nm red or 660nm red instead of 890nm infrared.
For diffraction limited lenses with an F# below the optimal aperture : The higher the F#, the higher is the DOF, the lower the resolution and thus the lower is the local contrast (= lower MTF) .
If lenses are not diffraction limited, increasing the F# makes means using more the center parts of the lens elements (which have lower aberrations). Therefore the resolution increases for a while until the critical aperture is reached, then it decreases.
![\[wF\# = (1 + M) * F\#\]](https://www.optowiki.info/wp-content/ql-cache/quicklatex.com-9f02739cbee64d6d5c9164ace5864659_l3.png "Rendered by QuickLaTeX.com")
![\[wF\# = 2* F\#\]](https://www.optowiki.info/wp-content/ql-cache/quicklatex.com-ec7ee20fcf9be156726c1aa61b47f093_l3.png "Rendered by QuickLaTeX.com")
![\[wF\# = 2 * (focal length / EPD ) = 2*F\# \]](https://www.optowiki.info/wp-content/ql-cache/quicklatex.com-7e9d6476ca6d0ce3a1ecf0f5ad27fbc7_l3.png "Rendered by QuickLaTeX.com")
![\[wF\# = 2 F\#\]](https://www.optowiki.info/wp-content/ql-cache/quicklatex.com-ac8d8f17dc09aba9d5d6e69470c9976d_l3.png "Rendered by QuickLaTeX.com")
![\[wF\# = (1 + M) F\# = (1 + 0)F\# = F\#\]](https://www.optowiki.info/wp-content/ql-cache/quicklatex.com-a75a60e150f5a7471bc9018b2e5a30c7_l3.png "Rendered by QuickLaTeX.com")

![\[ D = 2 * 1.22 * wF\# * Wavelength \]](https://www.optowiki.info/wp-content/ql-cache/quicklatex.com-191bfb4ff2dbfda750dc25e4c9a99eb1_l3.png "Rendered by QuickLaTeX.com")

 are constant.
are constant. is the same for both lenses.
is the same for both lenses. .
. , also the angle
, also the angle  doesn’t change.
doesn’t change.
 , which is the opening angle of the double cone at pixel level.
, which is the opening angle of the double cone at pixel level.