= Magnification
a) Bei telezentrischen Objektiven ist das das Verhältnis der Bildgrösse zur Objektausschnittgrösse
b) Bei entozentrischen Objektiven ist das
das Verhältnis der Bildgrösse zur Objektausschnittgrösse bei vorgegebener Entfernung.
Beispiel (telezentrisches Objektiv)
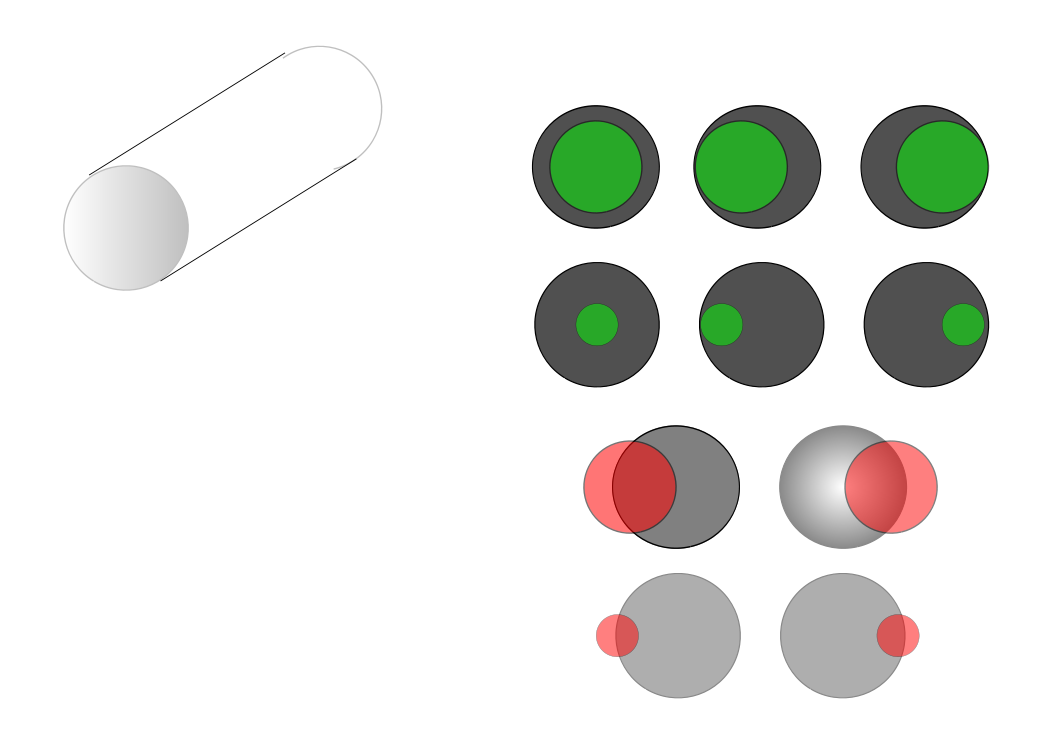
Soll mit einem 1/3″ Sensor (=6mm Diagonale!) ein Objektausschnitt mit 10mm Diagonale abgebildet werden, benötigt man eine Vergrösserung von 6/10 = 0.6x
Soll mit einem 1/3″ Sensor (=6mm Diagonale!) ein Objektausschnitt mit 10mm Diagonale abgebildet werden, benötigt man eine Vergrösserung von 6/10 = 0.6x
Je kleiner der Vergrösserungsfaktor, desto grösser der sichtbare Objektausschnitt. Bekommt man also ein Objektiv mit der gewünschten Vergrösserung nicht, kann man eines mit etwas kleinerem Vergrösserungsfaktor wählen, z.b. 0.55x in Beispiel 1 oben.
Beispiel (entozentrisches Objektiv)
Bei einem 1/2″ Sensor (8mm Diagonale), einer Entfernung von 500mm und einem Objektausschnitt von 16mm Diagonale, liegt ein Vergrösserungsfaktor von 8 / 16 = 0.5 vor.
In der Doppelten Entfernung (1000mm) sieht das Objektiv etwa doppelt so viel (32mm). Dadurch ergibt sich ein Vergrösserungsfaktor von 8/32 = 0.25
Bei einem 1/2″ Sensor (8mm Diagonale), einer Entfernung von 500mm und einem Objektausschnitt von 16mm Diagonale, liegt ein Vergrösserungsfaktor von 8 / 16 = 0.5 vor.
In der Doppelten Entfernung (1000mm) sieht das Objektiv etwa doppelt so viel (32mm). Dadurch ergibt sich ein Vergrösserungsfaktor von 8/32 = 0.25
Insbesondere ist die Vergrösserung bei unendlich entfernten Objektiven Null!
Da entozentrische Objektive in jeder Entfernung vor dem Objektiv einen anderen Objektausschnitt sehen, liegt auch in jeder Entfernung eine andere Vergrösserung vor!
Mit jedem verkleinernden entozentrischen Objektiv lässt sich (jenseits der MOD) jede Vergrösserung erreichen! .. Es muss nur der Abstand zwischen Objekt und Kamera angepasst werden.
Mit jedem verkleinernden entozentrischen Objektiv lässt sich (jenseits der MOD) jede Vergrösserung erreichen! .. Es muss nur der Abstand zwischen Objekt und Kamera angepasst werden.
Man könnte die naive Hoffnung haben, dass man dann nur noch ein Objektiv für alle Applikationen braucht .. aber:
Bei Änderung des Objektabstands ändert sich bei entozentrischen Objektiven die Perspektive – nicht so bei telzentrischen
Bei Änderung des Objektabstands ändert sich bei entozentrischen Objektiven die Perspektive – nicht so bei telzentrischen

Typische hohe Vergrösserungen in der Bildverarbeitetung enden bei 10x.
Typische hohe Vergrösserungen in der Mikroskopie enden bei 100x, wobei Verbgrößerungen über 40x typischerweise need Immersion benötigen, d.h. Das Objektiv wird Objektseitig in Öl getaucht !
Wenn man übre höhere Vergröserungen wie 200x oder 400x liest, bestehen gute Chancen, dass die Größe des Monitors mit in die Berechnung einbezogen wurde!
Typische hohe Vergrösserungen in der Mikroskopie enden bei 100x, wobei Verbgrößerungen über 40x typischerweise need Immersion benötigen, d.h. Das Objektiv wird Objektseitig in Öl getaucht !
Wenn man übre höhere Vergröserungen wie 200x oder 400x liest, bestehen gute Chancen, dass die Größe des Monitors mit in die Berechnung einbezogen wurde!
siehe :
optische Vergrößerungerung
elektronische Vergrößerung
Monitorvergrößerung